Desarrollo de las Toberas de Empuje Vectorial
Rockwell X-31A
En la década de los 70 el Dr. Wolfang Herbst, de MBB (Messerschmitt-Bolkow-Blohm) propuso el revolucionario concepto de variar el ángulo de empuje del chorro del motor de los aviones para mantener el control de la aeronave una vez que la posición natural de perdida hubiera sido alcanzada o sobrepasada. Así las toberas vectorizables, reemplazarían a los timones en la zona de post-pérdida. La mayor dificultad estribaba en integrar al sistema de control de vuelo computarizado de la aeronave el vector de empuje tanto dentro como más allá de las tolerancias naturales de pérdida.
Se realizaron pruebas simuladas del concepto mediante CFD (Computational Fluid Dynamic _ Dinámica de Fluidos Computacional ). Finalmente MBB y Rockwell International bajo los auspicios del gobierno alemán y la DARPA norteamericana comenzaron el desarrollo conjunto del X-31A, primera aeronave de la serie X desarrollada mediante la cooperación internacional. Posteriormente se incorporaron la NASA, la USAF, la US Navy y el DLR alemán.
Para abaratar costos se partió de la base del Eurofighter 2000 y se usaron componentes de otros aviones ya en servicio, siendo el X-31A un monomotor con ala delta y planos canard. El motor seleccionado para propulsarlo fue el General Electric F-404 equipado en su tobera de escape con 3 paletas de desvío del empuje. Fabricadas con fibra de carbono, estas paletas podian desviar, o sectorizar, hasta 15° la dirección de escape de los gases. El sistema de paletas vectoriales fue bautizado “Remos de Pagaya”
El 1er vuelo del X-31A fue el 11 de octubre de 1990. A fines de 1991 se llevaron a cabo vuelos con ángulos de trepada de hasta 50° con pleno control de la aeronave.
En abril de 1992 se iniciaron los ensayos de post-pérdida y se cumplieron vuelos estabilizados en dirección horizontal con ángulos de ataque de 70° y giros de 360° a este ángulo de vuelo. Otro hito fue la "Maniobra Herbst" en la que el X-31A trepa a gran velocidad en una extrema maniobra post-pérdida y gira en un radio estrecho a alta velocidad hacia la dirección opuesta. La aeronave puede, de este modo, virar 180° en un radio extremadamente pequeño.
Finalmente en septiembre de 1993 se realizaron ejercicios de combate aéreo cercano, usando la vectorización, contra un F/A-18A resultando vencedor el X-31A en el 80% de los encuentros.
Hasta el año 95 se realizaron 523 vuelos y 339 horas con los dos prototipos del X-31A, recopilándose valiosos datos sobre el vuelo post-pérdida.

Rockwell X-31A durante un ensayo sin cola para demostrar la controlabilidad lograda con la tobera vectorial
Actualmente el X-31A esta disponible para realizar nuevos ensayos cuando sea necesario o cuando algun organismo lo solicite. Durante un tiempo se hablo de que el X-31A podía ser alistado para ensayarr la nueva tobera vectorial en tres dimensiones de la empresa española ITP. Esta tobera se destaca por tener un diseño de anillos portadores que emplean un único sistema de actuadores hidráulicos para controlar todas las funciones de la tobera: la sección convergente de la garganta y la sección convergente/divergente y vectorizable de la tobera, es decir los pétalos exteriores. Este sistema mejora las prestaciones del motor y reduce el peso y los costes. Sus características son un ángulo máximo de deflexión mecánica de 20°, un ángulo máximo de deflexión fluidodinámica de 23° y una velocidad máxima de deflexión de 60°/Seg. Es posible que cuando se complete su desarrollo esta tobera equipe a futuras versiones del Saab JAS39 "Gripen" y el Eurofighter EF-2000.

Desarrollos de la NASA
En los EEUU otras investigaciones en este campo se realizaron a bordo del Mc Donnell-Douglas F-15S/MTD, el Mc Donnell-Douglas F-18 HARV y el General Dynamics F-16 MATV, cuyos proyectos fueron patrocinados por la NASA en el ambito de su programa de investigación de vuelo con altos ángulos de ataque. Dentro de este programa el F-18 HARV testeaba los datos aerodinámicos a los altos ángulos del ataque para validar la investigaciones en CFD y en el túnel de viento. El X-31A estudiaba el empuje vectorial para el combate aéreo maniobrado, mientras que el F-16 MATV era una demostración de cómo el empuje vectorial se podría aplicar al avión operacional.

F-18 HARV (vehículo de investigación de alta alfa) X-31 y F-16 MATV (vectorización de empuje multieje)
Mc Donnell-Douglas F-18 HARV
El F-18 HARV (High Alpha Research Vehicle) tenía 3 paletas montadas alrededor de las toberas de cada motor (como en el X-31A) para desviar el vector de empuje, un sistema de mandos de vuelo con un nuevo software que integraba el control vectorial en todas las envolventes del vuelo y las aletas “Forebody”. Estas aletas eran básicamente estructuras con bisagras en el lado delantero del fuselaje cuyo fin era proporcionar control a altos ángulos de ataque, obrando recíprocamente con los vórtices generados a esos ángulos de ataque, para crear fuerzas laterales. Las paletas vectoriales proporcionaban control en alabeo, cabeceo y guiñada en vuelos post-pérdida (hasta 70°) cuando los controles aerodinámicos eran inutilizables. Este avión realizo 385 vuelos desde abril de 1987 a septiembre de 1996.
Las "Paletas Vectoriales"

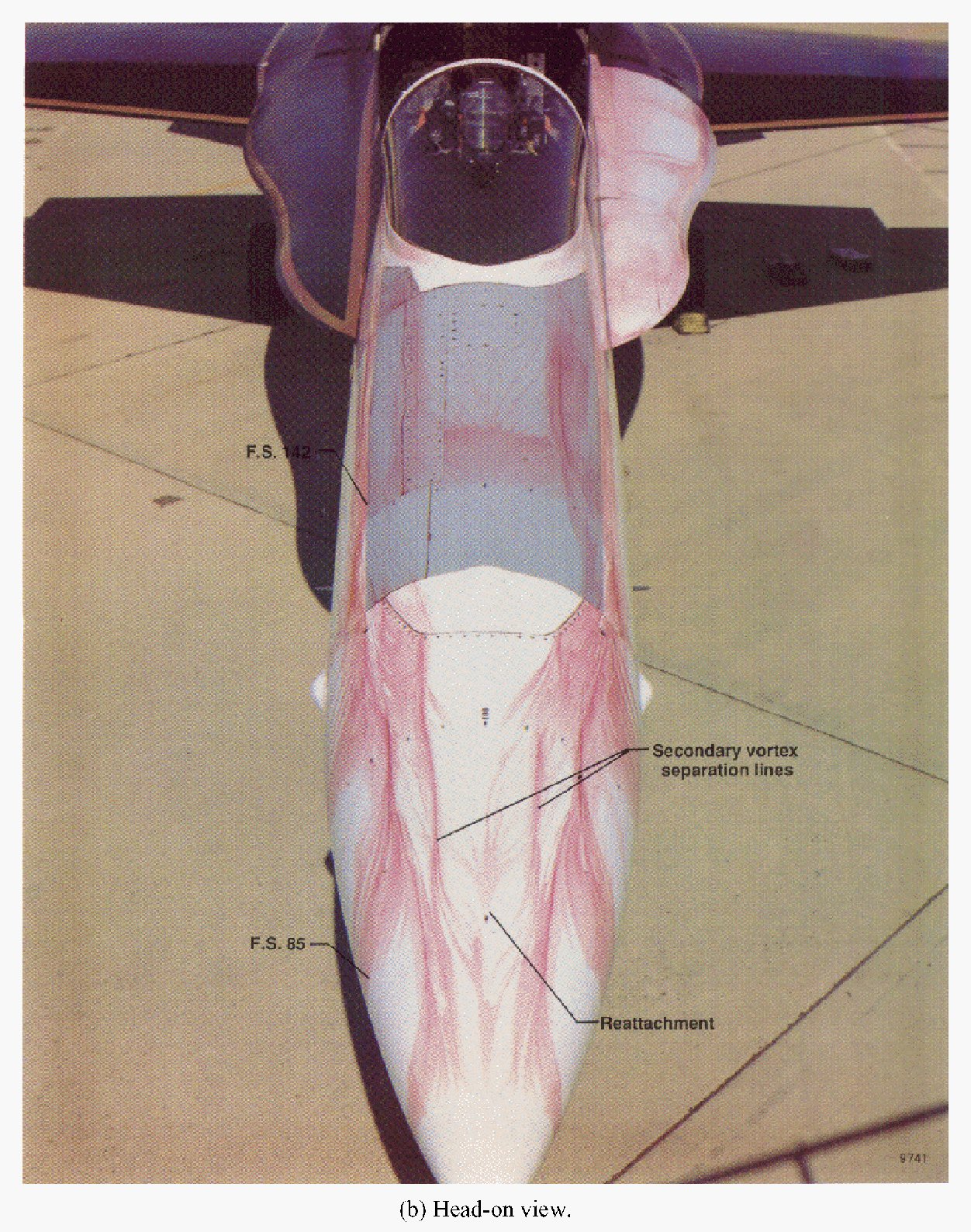
Detalle de visualización de flujo de las Aletas “Forebody”


La NASA perforó pequeños orificios alrededor del vehículo de investigación de alto ángulo de ataque F-18 (HARV) y se liberó un líquido a base de glicol de color rojo a través de ellos durante el vuelo, lo que proporcionó una visualización del flujo para los estudios.


General Dynamics F-16 MATV
El F-16 MATV (Multi Axial Thrust-Vectoring) estaba equipado con 3 paletas divergentes a la salida de la tobera del motor Pratt & Whitney F110-GE-129. Estas paletas eran capaces de vectorizar los gases de escape a 17° en cualquier dirección. Estaban fijadas individualmente por medio de tubos al fuselaje del avión y eran accionadas por actuadores hidráulicos independientes que las situaban a 120° entre si cuando eran utilizadas (sistema parecido al del F-18 HARV).
La ventaja de este sistema era que podía ser adaptada a cualquier F-16 que contara con el motor F110 y que tuviera un sistema de mandos de vuelo digital. El movimiento de los tres actuadores era ordenado por un control electrónico del vector (VEC), una versión modificada del control digital del motor usado por el F110-GE-129. Los objetivos del programa eran la demostración de la utilidad táctica del empuje vectorial dentro del combate aéreo cerrado y el uso del control integrado del empuje vectorial en vuelo. El avión logro volar con ángulo de ataque constante de hasta 86° y un ángulo de ataque transitorio de hasta 180°. Es decir el avión podía volar con la nariz apuntando hacia atrás por un breve tiempo. Se concluyo que el empuje vectorial proporciona una ventaja significativa en términos de combate al evitar el riesgo de la salida del vuelo controlado durante maniobras violentas. Sin embargo, el uso de las maniobras a altos ángulos de ataque acrecientaba la vulnerabilidad del avión por la pérdida de energía cinética (velocidad) que se produce durante ellas. Este avión realizo 130 vuelos desde julio de 1993 hasta marzo de 1995.

F-16 MATV



Mc Donnell-Douglas F-15S/MTD
El F-15S/MTD (Stol / Manouvering Technology Demostrator) era un F-15 dotado de planos canard en sus tomas de aire, control de vuelo computarizado y motores Pratt & Whitney F-100 con toberas vectoriales cuadrangulares, fabricadas en fibra de carbono, equipadas con inversores de empuje y capaces de deflectar a ± 20° respecto al eje horizontal. Sus objetivos más importantes eran experimentar y desarrollar una tecnología avanzada de empuje vectorial bidimensional y en las toberas de salida de empuje invertido. Este avión de investigación STOL y vuelo post-pérdida realizo su 1 vuelo el 7 de septiembre de 1988. Se alcanzaron distancias de despegue de 457 m y de aterrizaje de 381 m con un ancho de pista de no más de 15 m, además de grandes mejoras en maniobrabilidad respecto al F-15 de serie. Condiciones estas que se suponía se darían en pistas de aterrizaje dañadas por bombas.
El F-15S/MTD realizo su 138avo y último vuelo el 12 de agosto de 1991.

F-15 S/MTD




El siguiente paso fue en el año 1996 con el F-15 ACTIVE ( Advanceds Control Technology for Integrated Aircraft _ Tecnología Avanzada para el Control Integrado de los Aviones) con motores F-100PW-229 y equipado con toberas vectoriales multipétalo circulares capaces de deflectar el flujo 20° en cualquier dirección, reemplazando a los controles convencionales en el control de alabeo y cabeceo. Este avión exploro el vuelo supersónico a MACH 1,85 con ángulos de ataque de 30°

F-15 ACTIVE


Boeing X-36
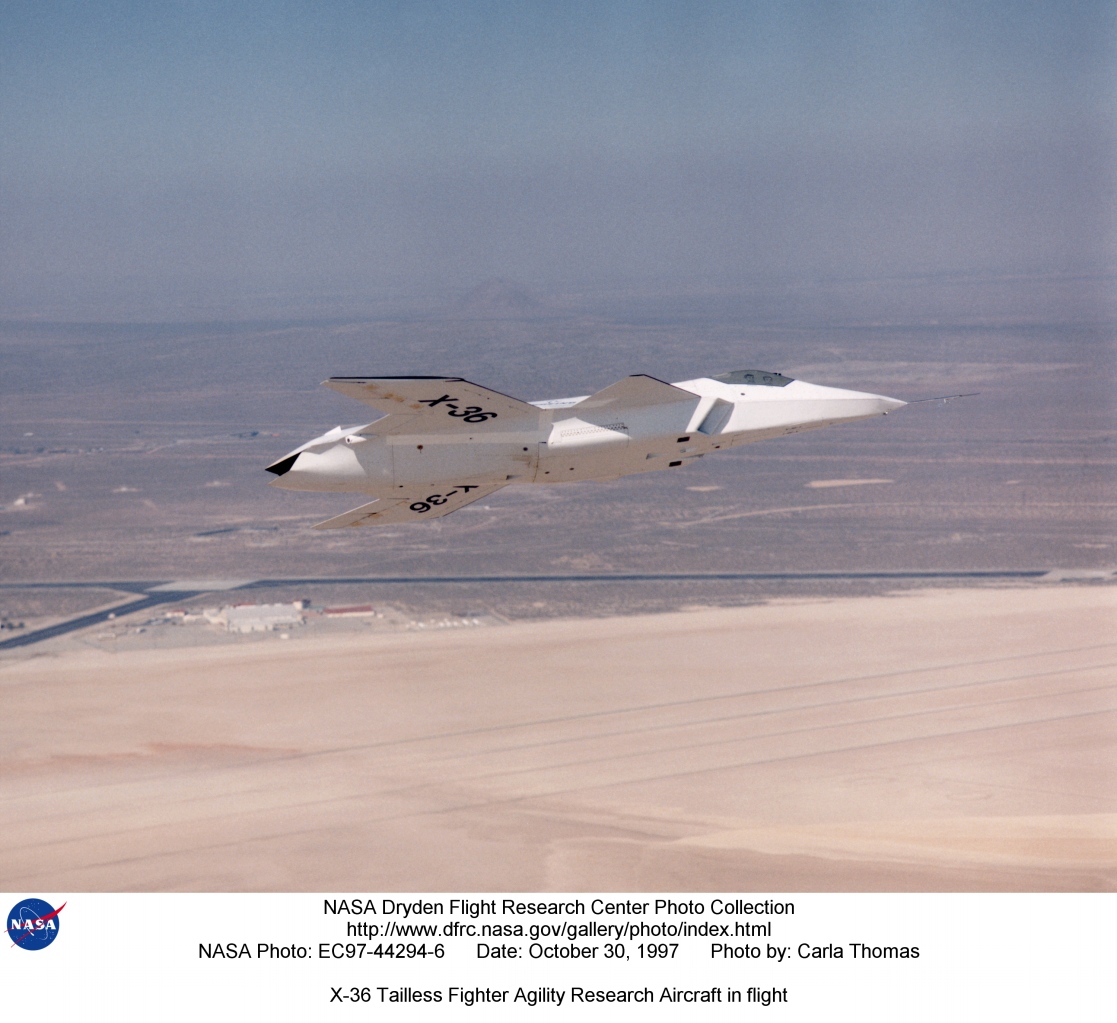
Finalmente podemos nombrar al Boeing X36, un avión de investigación a escala, manejado a control remoto y con mandos Fly by Wire. El X-36 carecía de unidad de cola y confiaba en el empuje vectorial de su tobera de escape para el control direccional, siendo estable aerodinámicamente y muy maniobrable.
El X-36 realizo 31 vuelos entre el 17 de mayo y el 12 de noviembre de 1997 llegando a volar con un ángulo de ataque de 40° a bajas velocidades.
Este avión no solo demostró el concepto de avión sin cola, sino también sirvió para probar en 1998 el nuevo software RESTORE desarrollado por Boeing y la USAF que en caso de daño de los controles aerodinámicos convencionales controlaba el avión mediante la tobera vectorial tridimensional .
Todas estas investigaciones serán incorporadas en los futuros aviones de combate de 5ta generación de los EEUU.
El Lockheed-Martín F-22A “Raptor”, el principal caza de superioridad aérea de la USAF en el siglo XXI y cuyo prototipo YF-22 voló a los mandos de Dave Ferguson el 29 de septiembre de 1990, esta equipado con toberas de empuje vectorial.
El F-22A es el 1er avión de superioridad aérea con capacidad real Stealth y de alcanzar velocidades supersónicas sin emplear post- combustión (con una relación empuje-peso de 1.4:1). Para incrementar su maniobrabilidad y cualidades STOL sus motores están dotados de toberas rectangulares bidimensionales de empuje vectorial que pueden ser anguladas a ± 20° en cualquier régimen de potencia, siendo el primer avión occidental en entrar en servicio que utiliza este sistema.
Dotado de control de vuelo Fly by Wire y una completa dotación de aviónica totalmente integrada, el Raptor es el avión de caza más caro de la historia.
El Boeing X-36 en vuelo
Desarrollos en la URSS/Rusia
Aparte de los EEUU, solo Rusia realizo un amplio estudio del empuje vectorial.
Los primeros trabajos sobre toberas vectoriales comenzaron en julio de 1986 utilizando aparatos Su-27A, como parte de los esfuerzos para mejorar significativamente la maniobrabilidad de los futuros cazas.
En 1989 se instalo una tobera direccional axisimetrica en el lado derecho de un Su-27A que podía orientarse ± 20° en cabeceo (según otras fuentes ± 15° en cabeceo) y era accionada por el sistema hidráulico del caza.
El avión elegido para probar la tobera vectorial fue el T-10-26 (07-02) conocido como Su-27 LL-UV(KS) (Letayushchaya Laboratoria- Upravlyayemy Vektor Tyagi Krugloye Soplo: Banco de Ensayos en Vuelo - Control de Orientación de Flujo - Tobera Asimétrica) que voló por 1ra vez el 21 de marzo de 1989.
En comparación con un Su-27 normal el T-10-26 demostró mejor maniobrabilidad y mayor control a bajas velocidades, por lo que se decidió desarrollar una versión de producción del motor con empuje vectorial, cuyas toberas vectoriales fueran incorporadas al sistema de control del Su-27
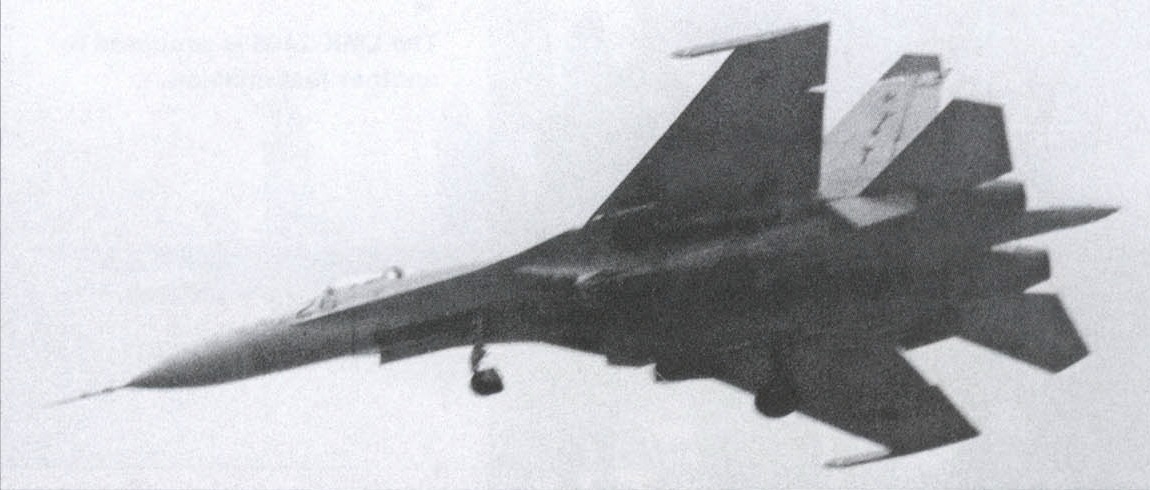
El Su-27 LL-UV(KS) en vuelo,
Debido a que la mejor configuración de tobera vectorial para un caza de 5ta generación no estaba definida se decidio ensayar en paralelo una tobera vectorial rectangular. El nuevo desarrollo se montó en la góndola motriz izquierda del Su-27UB 02-02 llamado Su-27 LL-UV (PS) (Ploskoye- Soplo _ Tobera Chata) que voló en 1990.
El Su-27 LL-UV (PS) realizo un total de 20 vuelo. Los ensayos demostraron una notable disminución en la firma infrarroja del caza, lo que reducía su vulnerabilidad ante misiles infrarrojos, y la tobera podía actuar como reversor de empuje.
Sin embargo, la falta de fondos impidió seguir investigando y desarrollando este tipo de tobera, además los desarrolladores se encontraron con dos problemas. Primero, la transición de sección circular a rectangular provocaba una inaceptable perdida de potencia de entre un 14 y un 17%. Segundo, la tobera rectangular era mucho mas pesada que la axisimétrica debido a la necesidad de contrarrestar las mayores cargas de flexión. aumentó el peso y se perdió de potencia.
El problema del peso se podría haber solucionado utilizando materiales como carbono-carbono y aislamiento térmico cerámico, pero esos materiales recién comenzaban a desarrollarse en la URSS en ese entonces.
Finalmente se decidió emplear una tobera circular orientable, que posteriormente se instalaría en el motor AL-31FP del Su-37 y el Su-30MK.
Siempre se pensó que esta tobera instalada en el Su-27 LL-UV (PS) estaba destinada al motor de ciclo variable Saturn Lyulka AL-41 del caza de 5ta generación MiG 1.42, pero por de acuerdo a recientes publicaciones parece ser que en realidad estaba destinada al bombardero medio furtivo Sukhoi T-60S, luego Izdeliye 54.
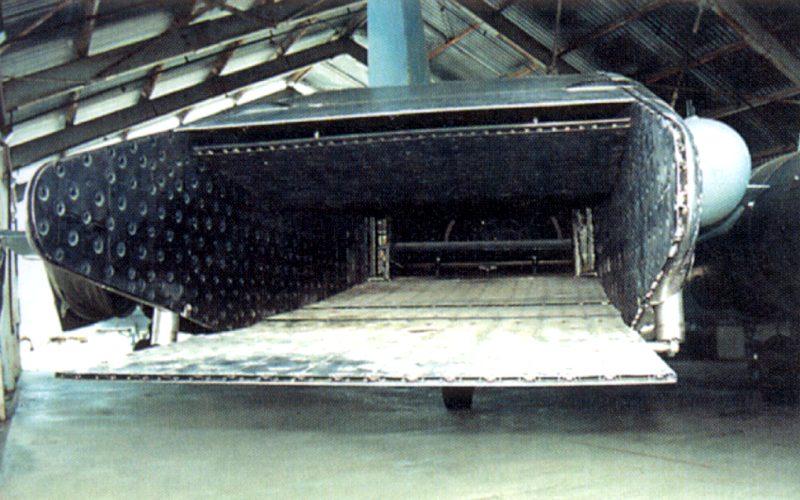

El Su-27 LL-UV (PS) abandonado al aire libre en el aeródromo de Zhukovsky y unas vistas laterales del Su-27 LL-UV (PS)




Sukhoi Su-37MR
El Su-37MR fue un caza multipropósito de 4ta generación ++ desarrollado a partir del Su-35 como medida interina hasta la entrada en servicio de los cazas de 5ta generación. Se obtuvo modificando el onceavo Su-35 (T-10M -11) al que se doto con 2 motores turbofan Saturn AL-31FP de 12.500 Kg de empuje unitario con toberas variables a ± 15° en cabeceo. El motor definitivo debería haber sido el AL-31FU de 12.800 kg, pero no estuvo a tiempo y el AL-31FP se obtuvo incorporando a un AL-31F de serie la tobera vectorial del AL-31FU. Las toberas orientables en combinación con el nuevo software de control de vuelo además de una mayor maniobrabilidad otorgaban al Su-37MR una mayor supervivencia en combate, ya que la perdida de uno de sus estabilizadores no implicaba necesariamente la de la aeronave que podría usar las toberas orientables diferencialmente para reemplazarlos.
Como muestra de las nuevas prestaciones el avión realizo virajes verticales de 360° sobre su eje transversal en aptitud de vuelo horizontal sin pérdida apreciable de altura, la maniobra “Herbst” del X-31, virajes longitudinales de 90° en un corto radio de giro, la tradicional maniobra “Cobra” con un ángulo de ataque de 120° y la “Super Cobra” a 180º. Todas estas maniobras gracias a las toberas orientables y la relación peso-empuje 1:1 que proporcionaban los motores.
La situación económica de Rusia impidio la entrada en servicio del Su-37MR y este avión se ofrecio para la exportación. Sin embargo los potenciales clientes, China y la India, se demostraron más interesadas por las versiones biplazas polivalentes del Flanker. Finalmente la fuerza aérea India adquirió 40 ejemplares del Su-30MKI, versión polivalente del interceptor biplaza Su-30 dotada de planos canards y toberas vectoriales.
Toberas Vectoriales del AL-31FP
Fotos del Su-37MR:
http://www.zona-militar.com/foros/showthread.php?p=515829#post515829
Su-30MKI
Mikoyan Girevich MiG-29OVT
La OKB MiG también puso en vuelo, en el año 2001, una aeronave con toberas vectoriales, el MiG29OVT. Su planta motriz es el Klimov RD-33-10M equipado con toberas vectoriales KLIVT 360º (Empuje Sectorizado Klimov) que introducen control vectorial en alabeo y cabeceo. El MiG-29OVT esta dotado de mandos HOTAS y pantallas EFIS multifunción.
Toberas del MiG-29OVT
Fotos del MiG-29OVT en este foro:
http://www.zona-militar.com/foros/showthread.php?t=16166&page=4
Sukhoi S-37 Berkut Y MiG 1.44
Finalmente los prototipos de Caza de 5ta generación rusos también fueron equipados con toberas vectoriales. Si bien ninguno de ellos entro finalmente en servicio.
El Sukhoi S- 37 “Berkut” (Águila Dorada) diseñado a partir de 1983 bajo la dirección de Mikhail Simonov realizo su 1er vuelo el 25 de septiembre de 1997 pilotado por Igor Votintsvt desde el aeródromo del LII de Zhukovsky. Sin embargo debido a la falta de interes oficial, el S-37 nunca recibió los motores Al-41F previstos y realizo todos sus vuelos con el Al-31F.
En su versión de serie debería haber contado con 2 Lyulka- Saturn AL-41F de 17.860 Kg de empuje con post-combustión ( con una relación empuje-peso de 1.3:1) equipados con toberas orientables
fotos del S-37 en este foro:

Los cazas de ala en flecha negativa de Sukhoi: Del S-22 al S-37 Berkut
Muy a menudo sucede que de algunas aeronaves solo se conoce, en el mejor sentido literal, la "punta del iceberg". Tal situación se presenta con uno de los
 www.zona-militar.com
www.zona-militar.com


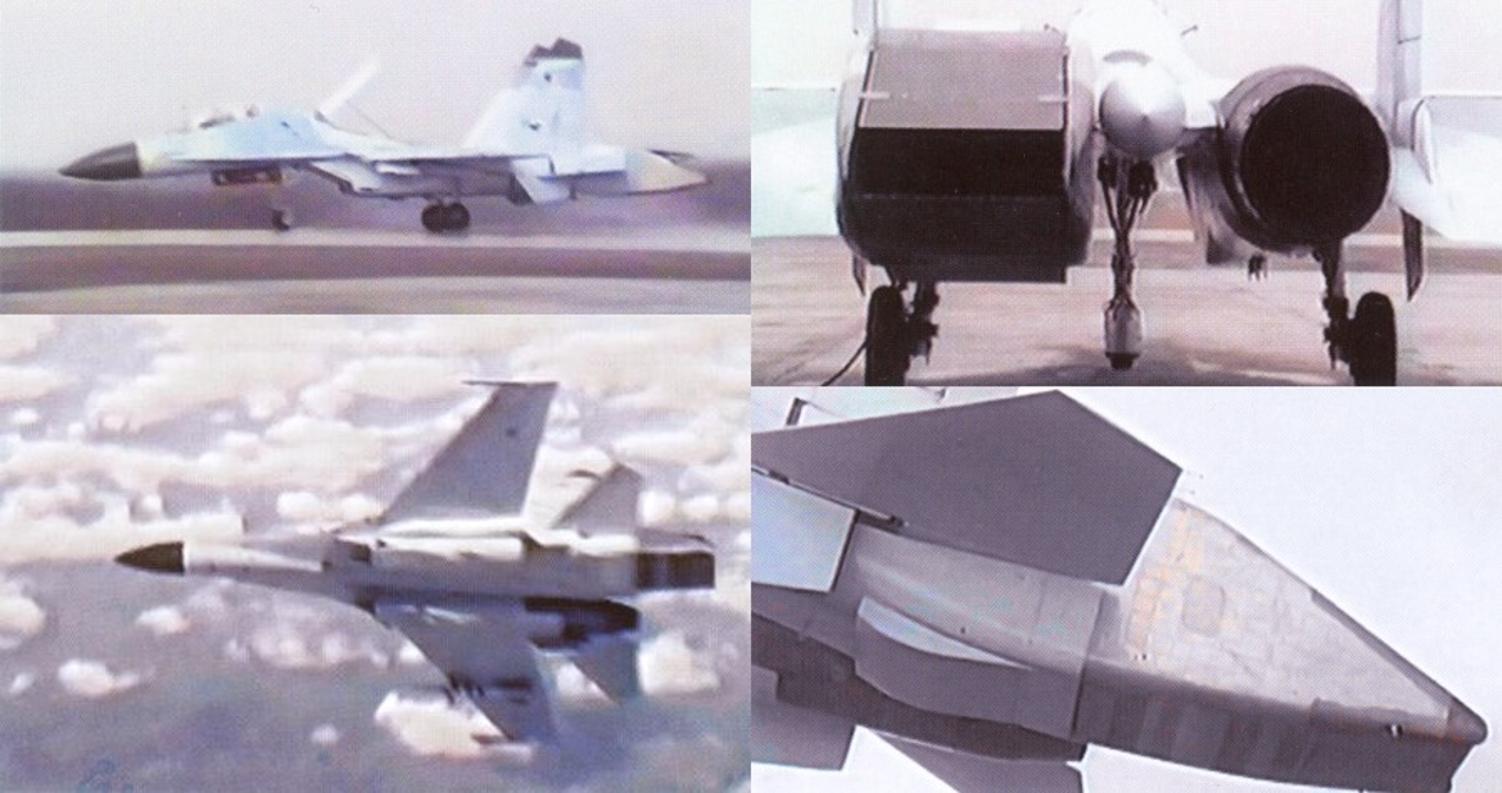
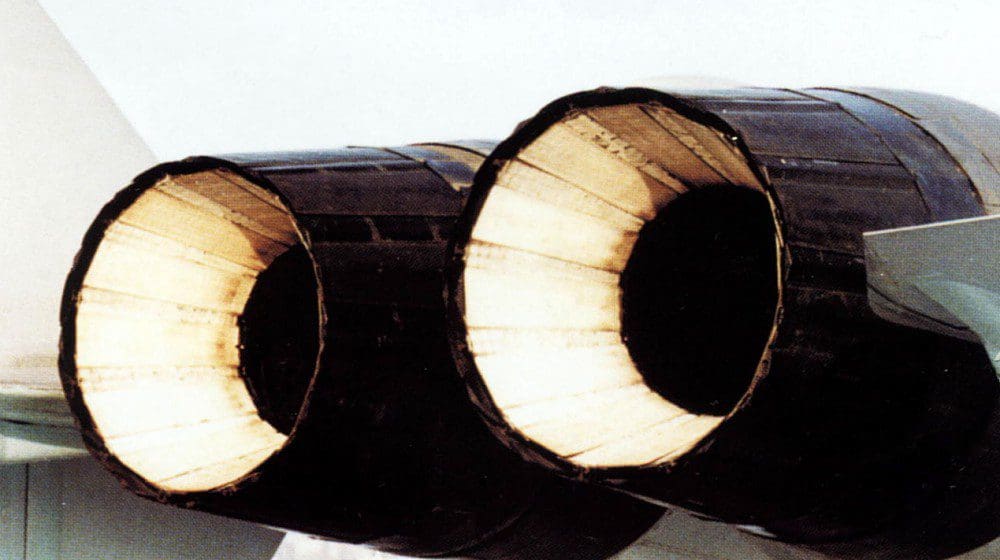
El rival del S-37 era el Mikoyan- Gurevich MiG 1.44 también denominado MFI (Mnogofunkcyonalni Frontovoy Istrebel _ Caza Táctico Multifuncional) diseñado bajo la dirección de G. Sedov y voló por 1ra vez el 29 de febrero de 2000 pilotado por V. Gorbunov. La planta motriz utilizada (como en el S-37) fue el turbofan Lyulka- Saturn AL-41F de 17.860 Kg de empuje máximo unitario dotados de toberas de escape vectoriales de geometría variable, capaces de deflectar a ± 15° en la vertical y a ± 8° en la horizontal. A diferencia del S-37, el MiG 1.44 si fue equipado con estos motores. Al igual que con el S-37, la situación económica de Rusia en esa época impidió que continuara el desarrollo de este caza, cuyo costos previsto eran 70 millones de la época, y solo fue utilizado en una par de vuelos experimentales para ensayar el motor AL-41F.
Finalmente el caza de 5ta generación ruso, sera Sukhoi PAK-FA, equipado con los definitivos AL-41F. Sin embargo todavía no esta clara la apariencia definitiva de este caza ni cuando volara.

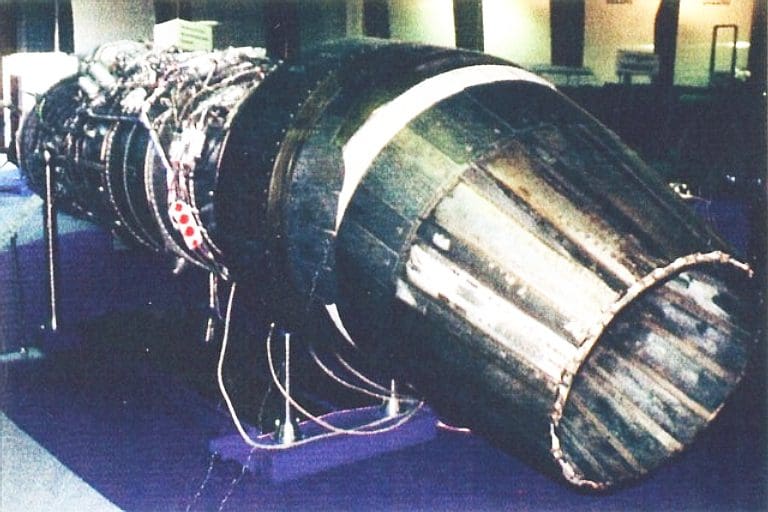
Las toberas vectoriales del AL-41F.

Fotos del MiG 1.44 en este foro:

MiG 1.42, el caza soviético de quinta generación
El pasado martes 24 de Diciembre los medios de prensa rusos informaron que durante un vuelo de prueba se estrello un caza Sukhoi Su-57 (denominado Felon
www.zona-militar.com
Fuentes:
Revista AERO espacio Número 511
Enciclopedia AVIONES DE GUERRA Fascículos varios _ Ed. PLANETA-AGOSTINI
www.boeing.com
www.dfrc.nasa.gov
www.thefighterenterprise.com
Última edición:












