Bueno, les dejo estos articulo para que se entretengan en Pascuas de Resurrección. Este tema se inicio en Pascuas del 2012 con una traducción de un articulo aparecido en www.paralay.com sobre el Yakovlev Yak-44. Me parecio muy interesante porque describe los avatares del programa de portaaviones soviético en paralelo con este prometedor avión embarcado, que como tantos otros proyectos de los 90 fue cancelado por la falta de fondos luego de la caida de la URSS.
Luego fueron surgiendo los artículos sobre los proyectos previos, asi que decidi ordenarlos cronologicamente.
Saludos y Felices Pascuas de 2012 y de 2021
Grulla

EL GARPOON Y EL TIFÓN
A mediados de la década de 1970 la Unión Soviética tenía una serie de OKBs trabajando en diseños de aviones basados en portaaviones bajo un programa general de desarrollo denominado “Tifón”. La flota naval soviética se abocaba a la nueva tarea de desarrollar una flota de proyección oceánica. Para esto comenzó con la construcción de cruceros atómicos misilisticos y buques portaaeronaves. Debido a que la doctrina militar soviética era de naturaleza «defensiva», los portaaviones en la URSS eran llamados de forma modesta «Crucero Pesado de Transporte de Aeronaves» [Tyazholyi Avianesushyi Kreyser – TAKR]. Sin embargo, el TAKR de la clase «Tbilisi» (en la actualidad hay una única nave de este tipo en la flota rusa, el Almirante N. G. Kuznetsov) es un verdadero portaaviones, en contraste con los barcos del tipo Proyecto 1123, Clase Moskva para la OTAN, o los Proyecto 1143 Clase Krechyet, Clase Kiev para la OTAN, ya dados de baja. Para la realización de las misiones a las que se enfrentaban los buques de la clase Moskva y Kiev, los helicópteros y los aviones del tipo Yak-38 eran claramente insuficientes.
El estudio de la experiencia de combate y los índices técnicos y operativos de los aviones de combate y de apoyo basados en los portaaviones norteamericanos, incluido el empleo en combate de los aviones de defensa antisubmarina, piquete radar y guerra electrónica, demostró que los aviones subsónicos con un largo alcance y destinados a las acciones contra objetivos en tierra y agua, integraban la base de las fuerzas de ataque de la US Navy. Era obvio que la presencia a bordo de la TAKR de varios tipos de aeronaves de combate sería considerablemente complicada y costosa e impactaría en su funcionamiento y apoyo logístico.
Dos proyectos fueron desarrollados en respuesta a estos estudios: el avión «Tifón» del diseñador V. A. Korchagin, más conocido como jefe de diseño de Aeronaves Anfibias Yamal, y el P-42 de la OKB G. M. Beriev. Este avión no se debe confundir con el más conocido Sukhoi P-42, una variante rompe récords del Su-27 Flanker, que entre 1986 y 1988 estableció 27 récords mundiales de ascenso, altitud y vuelo horizontal.
 Portaaviones Proyecto 1160 Oriol. el P-42 o el M-45 Arpón deberían haber sido su aeronave embarcada AEW/ASW.
Portaaviones Proyecto 1160 Oriol. el P-42 o el M-45 Arpón deberían haber sido su aeronave embarcada AEW/ASW.
EL BERIEV P-42 “GARPOON”
El desarrollo del avión subsónico antisubmarino P-42, proyectado por la OKB Beriev, fue autorizado el 5 de junio de 1971. Las misiones del P-42 Garpoon (Arpón), que iba a embarcarse en el futuro portaaviones soviético Proyecto 1160, eran similares a las del S-3 Viking basado en los portaaviones de la US Navy. El P-42 era un monoplano de ala alta dotado de un ala trapezoidal con flecha moderada, cola trapezoidal clásica y dos motores turbofan TRDTS D-36 en góndolas subalares
El avión iba a despegar desde las catapultas del buque y apontar en la cubierta con la ayuda de un gancho de detención ubicado en la cola. Para ahorrar espacio de almacenamiento en la cubierta y hangar del portaaviones, el ala y empenajes horizontales del P-42 se plegaban a media envergadura.

Beriev P-42 sobrevolando el portaaviones Proyecto 1160.
Además de la versión básica ASW, se habían previsto las variantes cisterna, AWACS embarcado, búsqueda y rescate, transporte, etc. Los trabajos de desarrollo avanzado de la versión ASW del P-42 fueron completados en 1972, mientras que se esperaba que las pruebas de vuelo del primer prototipo comenzaran en 1976
El Consejo de Ministros de la URSS decidió que era prioritario el desarrollo de la variante ASW del P-42, y que se aplazara la creación de la variante AWACS. Sin embargo, los cazas embarcados en el buque 1160 no podrían garantizar con eficacia la defensa aérea de la flota, que era la principal tarea del portaviones soviético, ya que las aeronaves AWACS, para la gestión de sus cazas, no iban a equipar al buque.
El Proyecto 1160 sería reemplazado en la mesa de diseño por el Proyecto 1153 de propulsión nuclear, el cual a su vez sería cancelado. El 1153 también seria cancelado y reemplazado por los mas pequeños buques del Proyecto 1143 equipados con helicópteros Ka-25 y cazas S/VTOL Yak-36. Estos cambios y cancelaciones acabarían con el primer intento soviético por desarrollar una aeronave AWACS/ASW embarcada.

Vista lateral de la variante AWACS del P-42.
Características Técnicas del Beriev P-42 AEW (Primera Configuración)
Envergadura: 16,00 m
Superficie Alar: 49,50 m2
Longitud: 15.70 m
Altura: 5,20 m
Peso Vacío: 14500 Kg.
Peso Normal al Despegue: 22000 kg.
Combustible: 5000 Kg.
Tipo de motor: 2 TRDD
Potencia: 2 x 4500 kg
Velocidad Máxima: 1.070 kilómetros
Alcance Máximo: 2520 kilómetros
Autonomía: 7 horas
Velocidad Ascensional Máxima: 1320 m / min
Armamento: Carga de Combate Normal 2500 kg, Máxima 550

Primera variante del P-42, aqui en versión carguera para enlace con portaaviones.
Características Técnicas del Beriev P-42 ASW (Segunda Configuración)
Envergadura: 19 m
Superficie Alar: 58,9 m2
Longitud: 15.70 m
Altura: 5,5 m
Peso Vacío: 15300 Kg.
Peso Normal al Despegue: 23000 Kg.
Combustible: 5.000 Kg.
Tipo de motor: 2 TRDD
Potencia: 2 x 4500 kg
Velocidad Máxima: 760 km/h
Alcance Máximo: 4.050 km.
Autonomía: 7 horas
Velocidad Ascensional Máxima: 1320 m/min
Armamento: Carga de Combate Normal 2700 kg
 Variante ASW del P-42. Notar sonda de repostaje sobre cabina y MAD en cono de cola, ambos retraídos.
Variante ASW del P-42. Notar sonda de repostaje sobre cabina y MAD en cono de cola, ambos retraídos.

Beriev P-42 Gapoon ASW.
EL YAMAL M-45 “TIFON”
El “Tifón”, con base en portaaviones era un monoplano con ala en flecha de implantación media y sección de cola en forma de cruz (con los empenajes horizontales ubicados a mitad del empenaje vertical).
Estaba previsto construirlo en dos configuraciones básicas de estructura y planta motriz, que se desglosaban en 6 variantes con las mínimas diferencias posibles entre ellas.
Sobre la base de la primera configuración se desarrollarían tres variantes: una aeronave de ataque táctico, una aeronave de guerra de electrónica y un cisterna de reaprovisionamiento en vuelo.
En la primera configuración el ala tenía una envergadura de 16 metros y una flecha de 27 grados en el borde de ataque.
Sobre la base de la segunda configuración se desarrollarían las otras tres variantes: defensa antisubmarina (ASW), piquete radar y control aerotransportado (AWACS) y una aeronave de transporte ligero. La segunda configuración del fuselaje se caracterizaba por un ala más grande y de menor flecha y el aumento de las secciones del fuselaje medio y de cola debido a un incremento en sus secciones superiores.
La segunda configuración tenía una envergadura de 19 metros y una flecha de 20 grados.

En la ilustración se ven las dos configuraciones básicas, a la izquierda la 1 y a la derecha la 2.
El conjunto de cola en flecha forma de cruz, tenía una forma análoga para todas las versiones de la aeronave. El fuselaje delantero, junto con la cubierta de vuelo, el tren de aterrizaje y el empenaje de cola se estandarizaron para ambas configuraciones. La conveniencia y la posibilidad de este enfoque se baso en los resultados del análisis de prototipos cercanos, los cuales demostraron que todas las versiones se podían desarrollar en una aeronave con un peso de despegue de 22 a 24 toneladas.
La planta motriz comprendía dos motores turbofan de construcción modular con un empuje nominal de 4.500 kg. Los motores estaban situados en dos góndolas externas sobre soportes por encima de la sección del fuselaje de cola, atrás del ala. En la primera configuración se utilizaban motores con una relación de derivación más pequeña. Los motores con una relación de derivación más grande, que aseguraban mayor alcance y tiempo de patrulla, eran utilizados en las aeronaves de la segunda configuración.

Variantes de la Primera Configuración del Tifón
La versión embarcada de ataque terrestre estaba diseñada para infligir impactos en concentraciones de tropas, puntos fuertes por separado, tanques y otros objetivos en movimiento, radares, puentes y otras unidades en tierra firme, y también contra buques de superficie en el mar abierto. La carga de combate podía ser portada en la bodega de bombas, cuyas dimensiones permitían instalar en ellas torpedos de lanzamiento aéreo, y en seis soportes subalares. . La carga bélica total prevista, interna y externa, era de 1500 a 1600 kg y estaba previsto llevar misiles del tipo X-15. Los soportes del medio, situados frente al chasis de las góndolas, estaban diseñados para llevar un peso de 700 kg. Para la defensa contra los cazas del enemigo y para hacer frente a aeronaves a baja altura y baja velocidad, podía ser equipado con misiles aire-aire. En la parte delantera del fuselaje, a la izquierda y por debajo de la cabina del piloto, había un cañón fijo de de 37 mm.
La aeronave de guerra de electrónica (REB) estaba prevista para la creación de interferencia activa contra el funcionamiento de radares y los medios de comunicación del enemigo en la zona de operación de los aviones de combate del portaaviones con el fin de garantizar el cumplimiento de su misión de combate. No estaba prevista la posibilidad de portar armamento para el ataque contra objetivos en tierra, pero si de llevar misiles aire-aire para la defensa independiente contra los cazas del enemigo. El complejo a bordo de la aeronave REB permitía trabajar simultáneamente en la completa obstrucción de no menos de 5 radares de diferente designación. La tripulación estaba compuesta por el piloto y tres operadores de los sistemas de guerra electrónica.
La versión cisterna estaba pensada para el reabastecimiento en vuelo de cualquier aeronave, que estuviera basada en el portaaviones o que participara en las operaciones de combate conjuntas. La versión cisterna se diseño durante la primera modificación de ala, planta de poder y de los principales sistemas de a bordo. La tripulación se componía de dos personas: el comandante de la aeronave y el segundo piloto/ navegador, que cumplía las funciones de operador de los sistemas de prestación de servicios de reabastecimiento.

De arriba hacia abajo. Primera Configuración: Ataque Terrestre, Guerra Electrónica y Cisterna Segunda Configuración: ASW, AWACS y Transporte Ligero
Variantes de la Segunda Configuración del Tifón
La misión del avión antisubmarino con base en portaaviones era la búsqueda y la destrucción de los submarinos desde una posición de patrulla de combate constante para proteger a los buques de escolta y al portaaviones, además de transferir datos a la flota para las operaciones de combate. En la composición de los equipos de búsqueda entraba el sistema “Sono”, capaz de determinar la deriva y las coordenadas de las sonoboyas sin ser necesario el vuelo por encima de estas. Además de los sistemas duplicados utilizados por la versión AWACS en la zona delantera del fuselaje, la versión ASW contaba con la estación de magnetometría, el sistema de infrarrojos y los sistemas de reconocimiento electrónico pasivo.
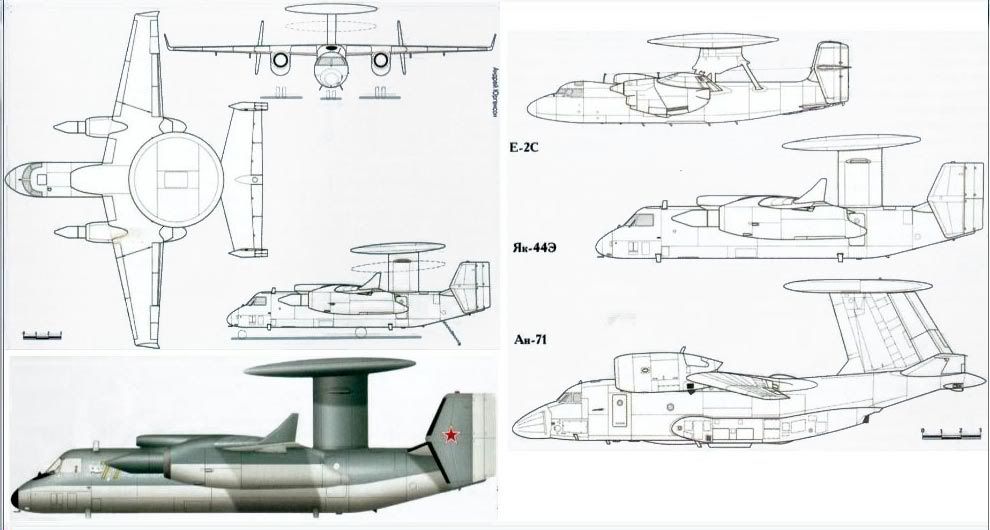
La misión de la aeronave de control operativo y de vigilancia por radar (URLD) era la detección de largo alcance y la clasificación de los blancos aéreos sobre el mar y la tierra; la garantía de la comunicación por radio enlace entre los aviones de combate, con el portaaviones y con las bases, el control operacional y la orientación de los aviones de combate y de los interceptores hacia sus blancos; la guía de los aviones de combate hacia las aeronaves cisternas, la identificación de los buques de guerra y la coordinación de las operaciones de socorro. El peso total del equipo URLD era de alrededor de 2500 a 3000 kg. La aeronave se diseñó durante la segunda modificación de la estructura y planta motriz. La antena de radar estaba en los carenados de nariz y de cola del fuselaje, de manera análoga a las antenas Cassegrain utilizadas en la aeronave AWACS inglesa Nimrod. En contraste con la aplicación de una antena giratoria de gran diámetro en el disco por encima del fuselaje, esta instalación disminuía la influencia mínima de esta en los parámetros de estabilidad y de pilotaje de la aeronave y hacía posible desarrollar una tercera modificación de la estructura del avión. El diseño de la aeronave, en principio, no difería en disposición de la versión antisubmarina.
La aeronave de transporte ligero con base en portaaviones (PLTS) se destinaba a la entrega urgente de personal y cargas para el portaaviones desde las bases costeras y viceversa, la evacuación urgente de los pacientes y heridos de la nave, y también para el aterrizaje con paracaídas de pequeños grupos de reconocimiento de diversión con armamento ligero. Esta variante se diseño durante la segunda modificación del ala y la planta motriz. En la bodega de carga había un piso de carga con dispositivos de sujeción de carga y los asientos abisagrados para los pasajeros, sujetados a los rieles con una capacidad de carga de 1000 kg. La entrada en la bodega de carga se realizaba a través de la escotilla de carga en el lado izquierdo del fuselaje antes del ala. En el extremo de la cola, al final de la bodega de carga había una escotilla para el paracaídas de aterrizaje.

Otra vista lateral de las dos variantes y las seis sub-variantes previstas.

Tres vistas del M-45 Tifon ASW.
 www.zona-militar.com
www.zona-militar.com
Luego fueron surgiendo los artículos sobre los proyectos previos, asi que decidi ordenarlos cronologicamente.
Saludos y Felices Pascuas de 2012 y de 2021
Grulla
Los Proyectos de AWACS embarcados soviéticos
Parte 1 - El Garpoon y el Tifón
Por Grulla - 28 febrero, 2018
EL GARPOON Y EL TIFÓN
A mediados de la década de 1970 la Unión Soviética tenía una serie de OKBs trabajando en diseños de aviones basados en portaaviones bajo un programa general de desarrollo denominado “Tifón”. La flota naval soviética se abocaba a la nueva tarea de desarrollar una flota de proyección oceánica. Para esto comenzó con la construcción de cruceros atómicos misilisticos y buques portaaeronaves. Debido a que la doctrina militar soviética era de naturaleza «defensiva», los portaaviones en la URSS eran llamados de forma modesta «Crucero Pesado de Transporte de Aeronaves» [Tyazholyi Avianesushyi Kreyser – TAKR]. Sin embargo, el TAKR de la clase «Tbilisi» (en la actualidad hay una única nave de este tipo en la flota rusa, el Almirante N. G. Kuznetsov) es un verdadero portaaviones, en contraste con los barcos del tipo Proyecto 1123, Clase Moskva para la OTAN, o los Proyecto 1143 Clase Krechyet, Clase Kiev para la OTAN, ya dados de baja. Para la realización de las misiones a las que se enfrentaban los buques de la clase Moskva y Kiev, los helicópteros y los aviones del tipo Yak-38 eran claramente insuficientes.
El estudio de la experiencia de combate y los índices técnicos y operativos de los aviones de combate y de apoyo basados en los portaaviones norteamericanos, incluido el empleo en combate de los aviones de defensa antisubmarina, piquete radar y guerra electrónica, demostró que los aviones subsónicos con un largo alcance y destinados a las acciones contra objetivos en tierra y agua, integraban la base de las fuerzas de ataque de la US Navy. Era obvio que la presencia a bordo de la TAKR de varios tipos de aeronaves de combate sería considerablemente complicada y costosa e impactaría en su funcionamiento y apoyo logístico.
Dos proyectos fueron desarrollados en respuesta a estos estudios: el avión «Tifón» del diseñador V. A. Korchagin, más conocido como jefe de diseño de Aeronaves Anfibias Yamal, y el P-42 de la OKB G. M. Beriev. Este avión no se debe confundir con el más conocido Sukhoi P-42, una variante rompe récords del Su-27 Flanker, que entre 1986 y 1988 estableció 27 récords mundiales de ascenso, altitud y vuelo horizontal.
EL BERIEV P-42 “GARPOON”
El desarrollo del avión subsónico antisubmarino P-42, proyectado por la OKB Beriev, fue autorizado el 5 de junio de 1971. Las misiones del P-42 Garpoon (Arpón), que iba a embarcarse en el futuro portaaviones soviético Proyecto 1160, eran similares a las del S-3 Viking basado en los portaaviones de la US Navy. El P-42 era un monoplano de ala alta dotado de un ala trapezoidal con flecha moderada, cola trapezoidal clásica y dos motores turbofan TRDTS D-36 en góndolas subalares
El avión iba a despegar desde las catapultas del buque y apontar en la cubierta con la ayuda de un gancho de detención ubicado en la cola. Para ahorrar espacio de almacenamiento en la cubierta y hangar del portaaviones, el ala y empenajes horizontales del P-42 se plegaban a media envergadura.
Beriev P-42 sobrevolando el portaaviones Proyecto 1160.
Además de la versión básica ASW, se habían previsto las variantes cisterna, AWACS embarcado, búsqueda y rescate, transporte, etc. Los trabajos de desarrollo avanzado de la versión ASW del P-42 fueron completados en 1972, mientras que se esperaba que las pruebas de vuelo del primer prototipo comenzaran en 1976
El Consejo de Ministros de la URSS decidió que era prioritario el desarrollo de la variante ASW del P-42, y que se aplazara la creación de la variante AWACS. Sin embargo, los cazas embarcados en el buque 1160 no podrían garantizar con eficacia la defensa aérea de la flota, que era la principal tarea del portaviones soviético, ya que las aeronaves AWACS, para la gestión de sus cazas, no iban a equipar al buque.
El Proyecto 1160 sería reemplazado en la mesa de diseño por el Proyecto 1153 de propulsión nuclear, el cual a su vez sería cancelado. El 1153 también seria cancelado y reemplazado por los mas pequeños buques del Proyecto 1143 equipados con helicópteros Ka-25 y cazas S/VTOL Yak-36. Estos cambios y cancelaciones acabarían con el primer intento soviético por desarrollar una aeronave AWACS/ASW embarcada.
Vista lateral de la variante AWACS del P-42.
Características Técnicas del Beriev P-42 AEW (Primera Configuración)
Envergadura: 16,00 m
Superficie Alar: 49,50 m2
Longitud: 15.70 m
Altura: 5,20 m
Peso Vacío: 14500 Kg.
Peso Normal al Despegue: 22000 kg.
Combustible: 5000 Kg.
Tipo de motor: 2 TRDD
Potencia: 2 x 4500 kg
Velocidad Máxima: 1.070 kilómetros
Alcance Máximo: 2520 kilómetros
Autonomía: 7 horas
Velocidad Ascensional Máxima: 1320 m / min
Armamento: Carga de Combate Normal 2500 kg, Máxima 550
Primera variante del P-42, aqui en versión carguera para enlace con portaaviones.
Características Técnicas del Beriev P-42 ASW (Segunda Configuración)
Envergadura: 19 m
Superficie Alar: 58,9 m2
Longitud: 15.70 m
Altura: 5,5 m
Peso Vacío: 15300 Kg.
Peso Normal al Despegue: 23000 Kg.
Combustible: 5.000 Kg.
Tipo de motor: 2 TRDD
Potencia: 2 x 4500 kg
Velocidad Máxima: 760 km/h
Alcance Máximo: 4.050 km.
Autonomía: 7 horas
Velocidad Ascensional Máxima: 1320 m/min
Armamento: Carga de Combate Normal 2700 kg
Beriev P-42 Gapoon ASW.
EL YAMAL M-45 “TIFON”
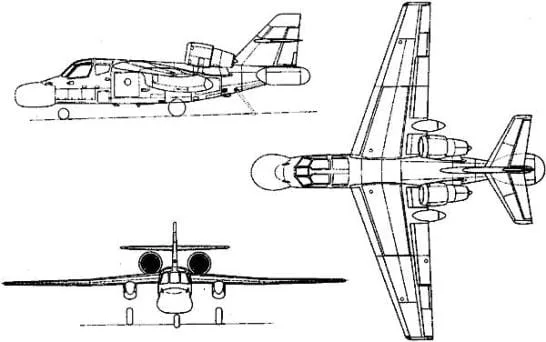
El “Tifón”, con base en portaaviones era un monoplano con ala en flecha de implantación media y sección de cola en forma de cruz (con los empenajes horizontales ubicados a mitad del empenaje vertical).
Estaba previsto construirlo en dos configuraciones básicas de estructura y planta motriz, que se desglosaban en 6 variantes con las mínimas diferencias posibles entre ellas.
Sobre la base de la primera configuración se desarrollarían tres variantes: una aeronave de ataque táctico, una aeronave de guerra de electrónica y un cisterna de reaprovisionamiento en vuelo.
En la primera configuración el ala tenía una envergadura de 16 metros y una flecha de 27 grados en el borde de ataque.
Sobre la base de la segunda configuración se desarrollarían las otras tres variantes: defensa antisubmarina (ASW), piquete radar y control aerotransportado (AWACS) y una aeronave de transporte ligero. La segunda configuración del fuselaje se caracterizaba por un ala más grande y de menor flecha y el aumento de las secciones del fuselaje medio y de cola debido a un incremento en sus secciones superiores.
La segunda configuración tenía una envergadura de 19 metros y una flecha de 20 grados.
En la ilustración se ven las dos configuraciones básicas, a la izquierda la 1 y a la derecha la 2.
El conjunto de cola en flecha forma de cruz, tenía una forma análoga para todas las versiones de la aeronave. El fuselaje delantero, junto con la cubierta de vuelo, el tren de aterrizaje y el empenaje de cola se estandarizaron para ambas configuraciones. La conveniencia y la posibilidad de este enfoque se baso en los resultados del análisis de prototipos cercanos, los cuales demostraron que todas las versiones se podían desarrollar en una aeronave con un peso de despegue de 22 a 24 toneladas.
La planta motriz comprendía dos motores turbofan de construcción modular con un empuje nominal de 4.500 kg. Los motores estaban situados en dos góndolas externas sobre soportes por encima de la sección del fuselaje de cola, atrás del ala. En la primera configuración se utilizaban motores con una relación de derivación más pequeña. Los motores con una relación de derivación más grande, que aseguraban mayor alcance y tiempo de patrulla, eran utilizados en las aeronaves de la segunda configuración.
Variantes de la Primera Configuración del Tifón
La versión embarcada de ataque terrestre estaba diseñada para infligir impactos en concentraciones de tropas, puntos fuertes por separado, tanques y otros objetivos en movimiento, radares, puentes y otras unidades en tierra firme, y también contra buques de superficie en el mar abierto. La carga de combate podía ser portada en la bodega de bombas, cuyas dimensiones permitían instalar en ellas torpedos de lanzamiento aéreo, y en seis soportes subalares. . La carga bélica total prevista, interna y externa, era de 1500 a 1600 kg y estaba previsto llevar misiles del tipo X-15. Los soportes del medio, situados frente al chasis de las góndolas, estaban diseñados para llevar un peso de 700 kg. Para la defensa contra los cazas del enemigo y para hacer frente a aeronaves a baja altura y baja velocidad, podía ser equipado con misiles aire-aire. En la parte delantera del fuselaje, a la izquierda y por debajo de la cabina del piloto, había un cañón fijo de de 37 mm.
La aeronave de guerra de electrónica (REB) estaba prevista para la creación de interferencia activa contra el funcionamiento de radares y los medios de comunicación del enemigo en la zona de operación de los aviones de combate del portaaviones con el fin de garantizar el cumplimiento de su misión de combate. No estaba prevista la posibilidad de portar armamento para el ataque contra objetivos en tierra, pero si de llevar misiles aire-aire para la defensa independiente contra los cazas del enemigo. El complejo a bordo de la aeronave REB permitía trabajar simultáneamente en la completa obstrucción de no menos de 5 radares de diferente designación. La tripulación estaba compuesta por el piloto y tres operadores de los sistemas de guerra electrónica.
La versión cisterna estaba pensada para el reabastecimiento en vuelo de cualquier aeronave, que estuviera basada en el portaaviones o que participara en las operaciones de combate conjuntas. La versión cisterna se diseño durante la primera modificación de ala, planta de poder y de los principales sistemas de a bordo. La tripulación se componía de dos personas: el comandante de la aeronave y el segundo piloto/ navegador, que cumplía las funciones de operador de los sistemas de prestación de servicios de reabastecimiento.
De arriba hacia abajo. Primera Configuración: Ataque Terrestre, Guerra Electrónica y Cisterna Segunda Configuración: ASW, AWACS y Transporte Ligero
Variantes de la Segunda Configuración del Tifón
La misión del avión antisubmarino con base en portaaviones era la búsqueda y la destrucción de los submarinos desde una posición de patrulla de combate constante para proteger a los buques de escolta y al portaaviones, además de transferir datos a la flota para las operaciones de combate. En la composición de los equipos de búsqueda entraba el sistema “Sono”, capaz de determinar la deriva y las coordenadas de las sonoboyas sin ser necesario el vuelo por encima de estas. Además de los sistemas duplicados utilizados por la versión AWACS en la zona delantera del fuselaje, la versión ASW contaba con la estación de magnetometría, el sistema de infrarrojos y los sistemas de reconocimiento electrónico pasivo.
La misión de la aeronave de control operativo y de vigilancia por radar (URLD) era la detección de largo alcance y la clasificación de los blancos aéreos sobre el mar y la tierra; la garantía de la comunicación por radio enlace entre los aviones de combate, con el portaaviones y con las bases, el control operacional y la orientación de los aviones de combate y de los interceptores hacia sus blancos; la guía de los aviones de combate hacia las aeronaves cisternas, la identificación de los buques de guerra y la coordinación de las operaciones de socorro. El peso total del equipo URLD era de alrededor de 2500 a 3000 kg. La aeronave se diseñó durante la segunda modificación de la estructura y planta motriz. La antena de radar estaba en los carenados de nariz y de cola del fuselaje, de manera análoga a las antenas Cassegrain utilizadas en la aeronave AWACS inglesa Nimrod. En contraste con la aplicación de una antena giratoria de gran diámetro en el disco por encima del fuselaje, esta instalación disminuía la influencia mínima de esta en los parámetros de estabilidad y de pilotaje de la aeronave y hacía posible desarrollar una tercera modificación de la estructura del avión. El diseño de la aeronave, en principio, no difería en disposición de la versión antisubmarina.
La aeronave de transporte ligero con base en portaaviones (PLTS) se destinaba a la entrega urgente de personal y cargas para el portaaviones desde las bases costeras y viceversa, la evacuación urgente de los pacientes y heridos de la nave, y también para el aterrizaje con paracaídas de pequeños grupos de reconocimiento de diversión con armamento ligero. Esta variante se diseño durante la segunda modificación del ala y la planta motriz. En la bodega de carga había un piso de carga con dispositivos de sujeción de carga y los asientos abisagrados para los pasajeros, sujetados a los rieles con una capacidad de carga de 1000 kg. La entrada en la bodega de carga se realizaba a través de la escotilla de carga en el lado izquierdo del fuselaje antes del ala. En el extremo de la cola, al final de la bodega de carga había una escotilla para el paracaídas de aterrizaje.
Otra vista lateral de las dos variantes y las seis sub-variantes previstas.
Tres vistas del M-45 Tifon ASW.
Los Proyectos de AWACS embarcados soviéticos - El Garpoon y el Tifón
EL GARPOON Y EL TIFÓN A mediados de la década de 1970 la Unión Soviética tenía una serie de OKBs trabajando en diseños de aviones basados en portaaviones
www.zona-militar.com
Última edición: